Il progetto AUTOLAB è una iniziativa finanziata con il contributo della Provincia di Cagliari – Assessorato Pubblica istruzione e si colloca all’interno di una serie di interventi e iniziative volte alla valorizzazione e potenziamento delle eccellenze presenti nell’istituto ITI “D. Scano” di Cagliari.
Motivazioni iniziali
Al fine di rispondere alla richiesta di sviluppare competenze spendibili in vari contesti di lavoro, quali capacità di risolvere problemi in autonomia e con modalità di lavoro in team, capacità di ideazione e di creatività oltre che competenze specifiche interdisciplinari, ci si è proposti di promuovere, all’interno di un gruppo aperto costituito da 16 studenti dell’indirizzo Informatico delle classi 3^, 4^ e 5^, l’acquisizione di conoscenze teoriche e applicative avanzate nel campo dei controlli automatici con particolare riguardo alle applicazioni robotiche.
Scopo di tale attività è stata l’attivazione un laboratorio in cui gli studenti, partendo dall’analisi di case study significativi reperibili in ambito robotico e controllistico più in generale, potessero sfruttare compiutamente in un percorso unitario, conoscenze acquisite nelle discipline di indirizzo oltre che riflettere su eventuali carenze disciplinari ostative ad una visione organica d’insieme, al fine ultimo di ideare, progettare e realizzare autonomamente un dispositivo robotico con logica di controllo implementata a microcontrollore.
Le principali tematiche funzionali alla realizzazione del dispositivo robotico, concernono: generalità sui sistemi robotici, logiche di controllo e loro implementazione digitale a tempo discreto, microcontrollori e programmazione, sistemi di localizzazione, sensori, trasduttori, condizionamento dei segnali, dispositivi di interfaccia, azionamenti e attuatori.
Attività svolta
Dopo una prima fase di studio e formazione sul sistema a microcontrollore arduino, che si è svolta tramite 6 incontri tenutisi nei laboratori dell’istituto e accompagnata da una attività di lavoro autonomo supportato online attraverso la piattaforma di e-learning Moodle, si è realizzato, durante 4 ulteriori incontri, un sistema costituito da:
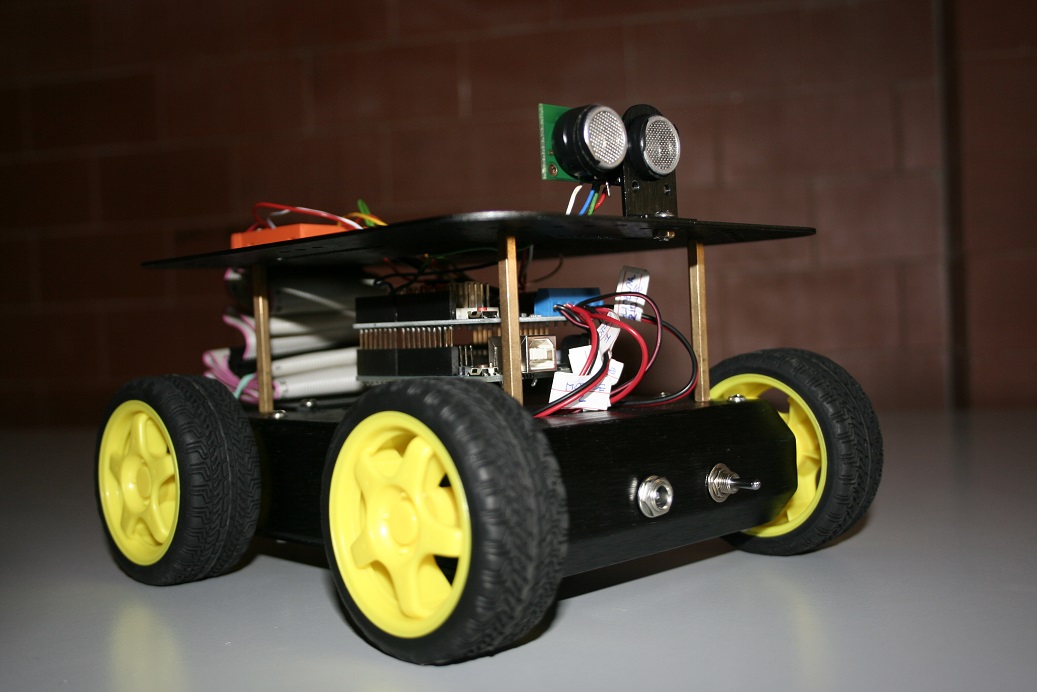
a) robot mobile 4W equipaggiato con Arduino 1 Rev.3 – Motor shield – pacco batterie per alimentazione autonoma – sensori riflettività – sensore temp. umid. – modulo bluetooth per comunicazione con stazione fissa di monitoraggio e controllo.
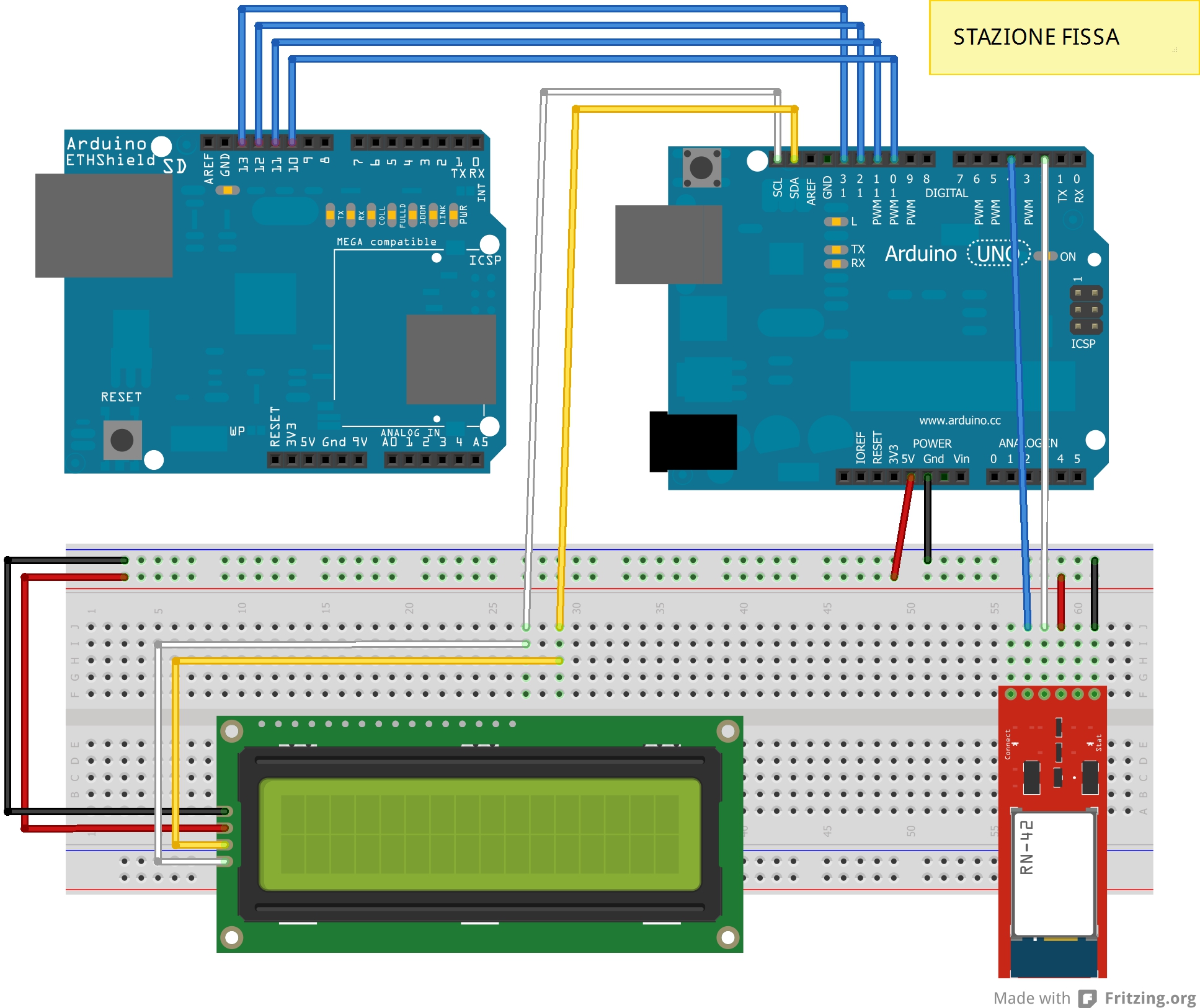
b) stazione fissa di monitoraggio/controllo costituita da Arduino 1 Rev.3 (con alimentatore stabilizzato) – ethernet shield per interfacciamento con rete cablata e possibilità di interagire in modalità client server con utente esterno per invio informazioni e ricezione comandi – modulo bluetooth per comunicazione con robot mobile
c) interfaccia Web che consenta di monitorare i parametri ambientali forniti dal robot mobile, di configurare il robot in una delle modalità previste al punto 2 e di impostare i comandi da comunicare al robot.
Oltre ad Arduino 1 Rev.3, Motor shield, Ethernet shield, sono stati utilizzati:
Sensore di distanza ad Ultrasuoni SRF04 (modalità d’impiego su arduino scuola)
Si è realizzato un veicolo mobile autonomo, vedi in figura sottostante, in grado di evitare ostacoli sul suo percorso e interfacciato tramite comunicazione Bluetooth a una stazione di controllo/monitoraggio, anch’essa realizzata con logica a microcontrollore, sulla quale si è implementato un Server Web idoneo a comunicare, tramite interfaccia html, parametri di supervisione di vario tipo.
Codice (in sviluppo)
Conclusioni e sviluppi futuri
Sebbene si tratti solamente di un dispositivo prototipale esso costituisce un utile base per sviluppi futuri oltre che come strumento didattico.
Si sono create le basi per la promozione di competenze, interne all’Istituto Tecnico “D. Scano”, che possano fornire supporto strategico stabile al servizio anche di altri indirizzi oltre che costituire un valore aggiunto per la scuola.
Gli alunni che hanno partecipato al corso, in particolare coloro che hanno frequentato regolarmente gli incontri, si sono mostrati interessati e coinvolti in tutte le attività proposte, inoltre, tale attività, è valsa per la determinazione del credito scolastico.
L’attività posta in essere ha consentito di creare un primo gruppo di lavoro sulle tematiche dell’elettronica applicata, dei controlli automatici e della robotica che si spera possa allargarsi coinvolgendo già dal prossimo anno scolastico più alunni e più docenti nella speranza che possa avere sia ricadute sulla didattica curricolare sia momenti di approfondimento, sperimentazione didattica e possibilità di valorizzazione delle eccellenze.